聯(lián)系人:趙先生
電 話:15206102827
郵 箱:Vincent@dmisensor.com
地 址:南京市江寧區(qū)天元東路52號
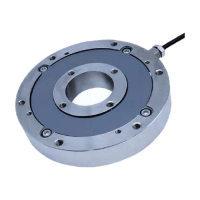
機(jī)器人關(guān)節(jié)扭矩傳感器是一種用于測量機(jī)器人關(guān)節(jié)扭矩的傳感器,其原理主要涉及電子、機(jī)械和材料工程。
關(guān)節(jié)扭矩傳感器的基本原理是應(yīng)變測量。當(dāng)機(jī)器人關(guān)節(jié)運(yùn)動時,扭矩傳感器會感受到由機(jī)器人關(guān)節(jié)施加在傳感器上的力矩,這會導(dǎo)致傳感器發(fā)生微小的形變。扭矩傳感器通過測量這種形變來確定扭矩的大小。
在機(jī)器人關(guān)節(jié)中,扭矩的傳遞通過齒輪、軸承和其他傳動部件實現(xiàn)。傳感器通常被安裝在這些傳動部件中的一個上,以便測量扭矩。其中一種常見的傳感器類型是應(yīng)變片傳感器。
應(yīng)變片傳感器是一種由電阻性材料制成的薄片,它們具有壓電效應(yīng)。當(dāng)扭矩作用于傳感器時,薄片會發(fā)生形變,導(dǎo)致電阻發(fā)生變化。這種電阻變化可以通過電路進(jìn)行測量,從而得到扭矩的大小。
為了實現(xiàn)一個可靠的關(guān)節(jié)扭矩傳感器,還需要考慮一些其他因素。例如,傳感器需要具有足夠的靈敏度和精度,以便能夠準(zhǔn)確地測量扭矩。此外,傳感器還需要具有良好的抗干擾性能,以防止外界干擾對測量結(jié)果的影響。
為了滿足這些要求,通常會采用一些附加技術(shù)。例如,將多個應(yīng)變片傳感器組合在一起以增加靈敏度和可靠性。還可以使用特殊的信號處理算法來濾除干擾信號。此外,還可以通過校準(zhǔn)傳感器來提高測量的準(zhǔn)確性。
器人關(guān)節(jié)扭矩傳感器")