湖州優質機器人關節扭矩傳感器廠家
發布時間:2022-10-08 01:19:35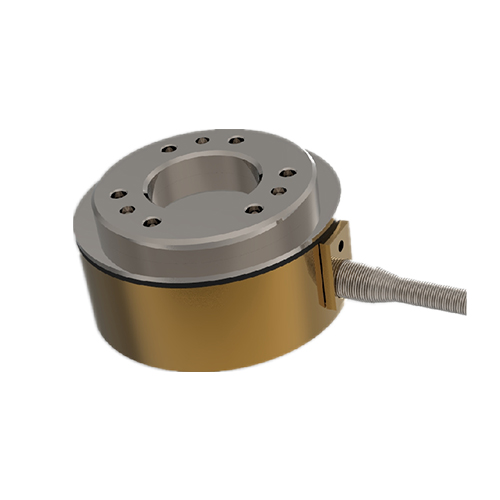
湖州優質機器人關節扭矩傳感器廠家
得益于成熟的傳感器解決方案,全新設計和智能軟件,我們實現了機器人可以觸摸并“感覺得到”這一技術。在機器人技術中,視覺和觸覺是互補的方式。由此業內專家預計,觸摸感應將如視覺技術一樣,很快加入到主流的機器人應用。在機械加工,如磨削,去毛刺,打磨和拋光中,讓機器人來完成這些工作曾經是非常復雜的,你需要根據空間體積進行大量的編程,而且也需要花費大量時間來進行糾錯。但是集成了多維力覺傳感器后,利用傳感器的路徑記錄功能,操作員可以簡單地抓住臂端裝置并進行預期的移動。傳感器記錄操作員施加的力和方向,然后機器人就可以重復操作員的動作。這將極大地提高工作效率,同時將有助于保障操作工人的安全。

湖州優質機器人關節扭矩傳感器廠家
壓電效應是模腔壓力傳感器的主要工作原理,壓電傳感器不能用于靜態測量,因為經過外力作用后的電荷,只有在回路具有無限大的輸入阻抗時才得到保存。實際的情況不是這樣的,所以這決定了壓電傳感器只能夠測量動態的應力。 壓電傳感器主要應用在加速度、壓力和力等的測量中。壓電式加速度傳感器是一種常用的加速度計。它具有結構簡單、體積小、重量輕、使用壽命長等優異的特點。壓電式加速度傳感器在飛機、汽車、船舶、橋梁和建筑的振動和沖擊測量中已經得到了廣泛的應用,特別是航空和宇航領域中更有它的特殊地位。壓電式傳感器也可以用來測量發動機內部燃燒壓力的測量和真空度的測量。

湖州優質機器人關節扭矩傳感器廠家
為了提高校準效率,德國達姆施塔特工業大學的Ewald等研制了全自動校準系統(一代)。多維力傳感器系統大大提高了校準的加載效率,但是該校準設備方案實現起來很復雜,由于采用了力發生器和力傳感器的組合來進行校準,加載的方向性、系統誤差等很大程度上取決于各種傳感器,因此從某種程度上增加了系統誤差。目前ETW采用了這種校準系統(二維力傳感器),在一代校準系統的基礎上進行了很多改進。上個世紀40年代,一些加載方法和載荷表就開始應用于多分量天平的校準過程。NASA蘭利研究中心Langley Research Center (LaRC)從1940年開始廣泛應用的是單元載荷表One Factor At The Time Table (OFAT),很多機構目前仍然還在使用這種加載方式。對于六自由度校準設備,OFAT方法從施加純凈的單分量載荷開始(253次實際加載卸載),然后再施加15組組合載荷(兩個分量的組合,481次實際加載卸載),可能大約需要6至8周時間。然而對于四自由度的校準設備很多組合載荷無法實現,加載點數被大大減少了。
湖州優質機器人關節扭矩傳感器廠家
六維力傳感器使用前都需要校準。對于多維力傳感器,校準是一件復雜的工作,數據處理方法也是多種多樣的。力傳感器性能的好壞與校準設備及方法密切相關。校準一般采用砝碼進行,因為砝碼具備非常高的穩定性和精準度,依靠重力及垂直向下的方向性,這種簡單標準載荷的可靠性超過了很多施力裝置。也有利用力發生器及高精度力傳感器實現自動加載與測量的,然而實現起來相當困難,并且這樣的成套裝置仍然必須通過砝碼進行首次校準與調試。

湖州優質機器人關節扭矩傳感器廠家
六維力傳感器主要作用于空間三個方向的力,除了要解決對所測力分量敏感的單調性和一致性問題外,還要解決因結構加工和工藝誤差引起的維間(軸間)干擾問題、動靜態標定問題以及矢量運算中的解耦算法和電路實現等,可以說,六維力傳感器是單維力傳感器的升級版本。六分量傳感器,也稱“六軸力傳感器”,是多維力傳感器中的一種,實際上就是一種能夠同時檢測3個力分量和3個力矩分量的力傳感器。作為一個仍在發展的研究對象,多維力傳感器在機器人,特別是研制高性能多維力傳感器和運用多維力傳感器中還存在很多問題,也是研究新型多維力傳感器的難點問題。六維力傳感器的優勢首先是可以力覺拖動示教,降低示教工作量,其次可以保證對打磨面的法向打磨,可以實現對復雜未知曲面的跟蹤打磨。