連云港周邊力控夾爪多少錢
發布時間:2023-05-27 01:13:55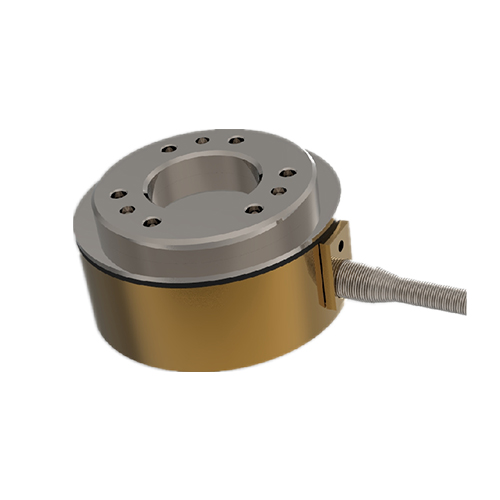
連云港周邊力控夾爪多少錢
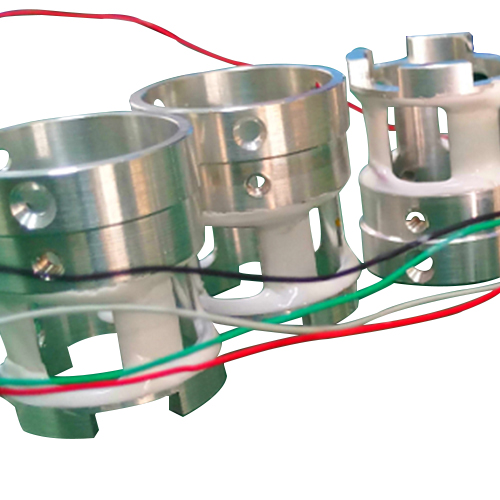
安裝稱六分量力感器重要的問題就是要是合理的,能夠讓其在日后的工作當中正常的使用。所以進行合理的安裝是非常關鍵的。那么在安裝六維力傳感器的過程當中需要注意什么問題。假如使用的是六維力傳感器,在安裝底座的時候一定要使用水平儀進行調整,達到水平狀態才能安裝。如果是安裝多個傳感器一起進行測量 ,那么就要讓多維傳感器的底部盡可能保持在一個水平面上。 這樣的發就可以確保任何一個傳感器所承受的力差不多是一樣的。與此同時,在加載裝置的兩側還需要假裝銅編織線制作而成的旁路器。

連云港周邊力控夾爪多少錢
六分量力傳感器傳感器品牌誤區:很多時候大家都認為國產的產品是不好用,甚至是不能用。追求廉價:物美價廉這是每個人希望看到的;但事實上,高品質的產品就決定了它的價格會相對的高一些。精度誤區:大家在選擇產品的時候,總以為精度很重要的;其實從某個角度來說:穩定性比產品的精度更重要,精度選擇應該是建立在高穩定性的基礎上的。選擇合適的量程、合適的精度、合適安裝方式、合適的輸出方式。

連云港周邊力控夾爪多少錢
多分量測力平臺傳遞信號時與是否旋轉、轉速和轉向無關。可以適應長時間、高轉速運轉。不需反復調零即可連續傳遞正反轉扭矩信號。能源及信號非接觸傳遞功能,輸出信號數字化功能。體積小、重量輕,易于安裝。沒有集流環等磨損件,可以高轉速長時間運行。可任意位置,任意方向安裝。精度高、穩定性好。抗干擾性強。多分量測力平臺形式的選擇主要取決于稱重的類型和安裝空間,保證安裝合適,稱重安全可靠;另一方面要考慮廠家的建議,對于力傳感器造廠家來講,它一般規定了傳感器的受力情況、性能指標、安裝形式、結構形式、彈性體的材質等。多分量測力平臺等溫度變化時,材料的E模量將會降低,導致產生應變。另外,應變片的靈敏度依賴于溫度。傳感器在高溫狀況下電阻的補償將產生更大的壓降。這將降低惠斯通電橋的輸出信號。傳感器在負載狀態下,線性誤差 也將產生變化。這可以通過對彈性體材料和結構的優化以及選擇精的測量點來完成。

連云港周邊力控夾爪多少錢
多維力傳感器是一種能夠同時測量兩個方向以上力及力矩分量的力傳感器,其廣泛應用于機器人手指、手爪研究;機器人外科手術研究;指力研究;牙齒研究;力反饋;剎車檢測;精密裝配、切削;復原研究;整形外科研究;產品測試;觸覺反饋;示教學習。行業覆蓋了機器人汽車制造、自動化流水線裝配、生物力學、航空航天輕紡工業等領域。三維力傳感器基f應變式測力傳感器的基礎上采用電阻應變式原理,也稱應變式三維力傳感器。

連云港周邊力控夾爪多少錢
一般說來,機器人是沒有觸覺的,但是他們也可以“進化” 出觸覺并受益于觸覺。我們賦予機器人多維力覺傳感器,機器人便能夠擁有觸覺,并且在簡單的環境中操縱物體,同時不失更高的精度和靈敏度。大多數為協同應用而設計的機器人都具有內置的力和扭矩感應功能以確保安全,特別是在靠近或直接與人類一起工作時。 但是那遠遠不夠,因為我們人類喜歡將沉悶,重復,骯臟和危險的任務都交給那些機電一體化機器人來完成。所以,我們更關注那些能夠實現真正工作的獨立或集成的六多維力傳感器,只有把這些高端傳感器集成在機電一體化機器人上才能實現我們的目的。
連云港周邊力控夾爪多少錢
多維力傳感器與六分量力傳感器相比,除了要解決對所測力分量敏感的單調性和一致性問題外,還要解決因結構加工和工藝誤差引起的維間(軸間)干擾問題、動靜態標定問題以及矢量運算中的解耦算法和電路實現等。多維力傳感器是一種能夠同時測量兩個方向以上力及力矩分量的力傳感器,多維力完整的形式是六維力/力矩傳感器,即能夠同時測量三個力分量和三個力矩分量的傳感器,目前廣泛使用的多維力傳感器就是這種傳感器。在笛卡爾坐標系中力和力矩可以各自分解為三個分量。